Заказчик обратился с проблемой неработоспособности модуля управления двигателями. Первоначально устройство запустилось на частоте 100 МГц и успешно прошло испытания в климатических условиях ±60 градусов, однако, быстродействия не хватало и увеличили частоту до 125 МГц, при этом модуль перестал запускаться даже при нормальных условиях.
Начали анализ проекта с системы питания ПЛИС, на которой прошивалась программа управления. Обнаружили, что одно из питаний (2_5V) обладает скачком импеданса в районе 16 МГц.
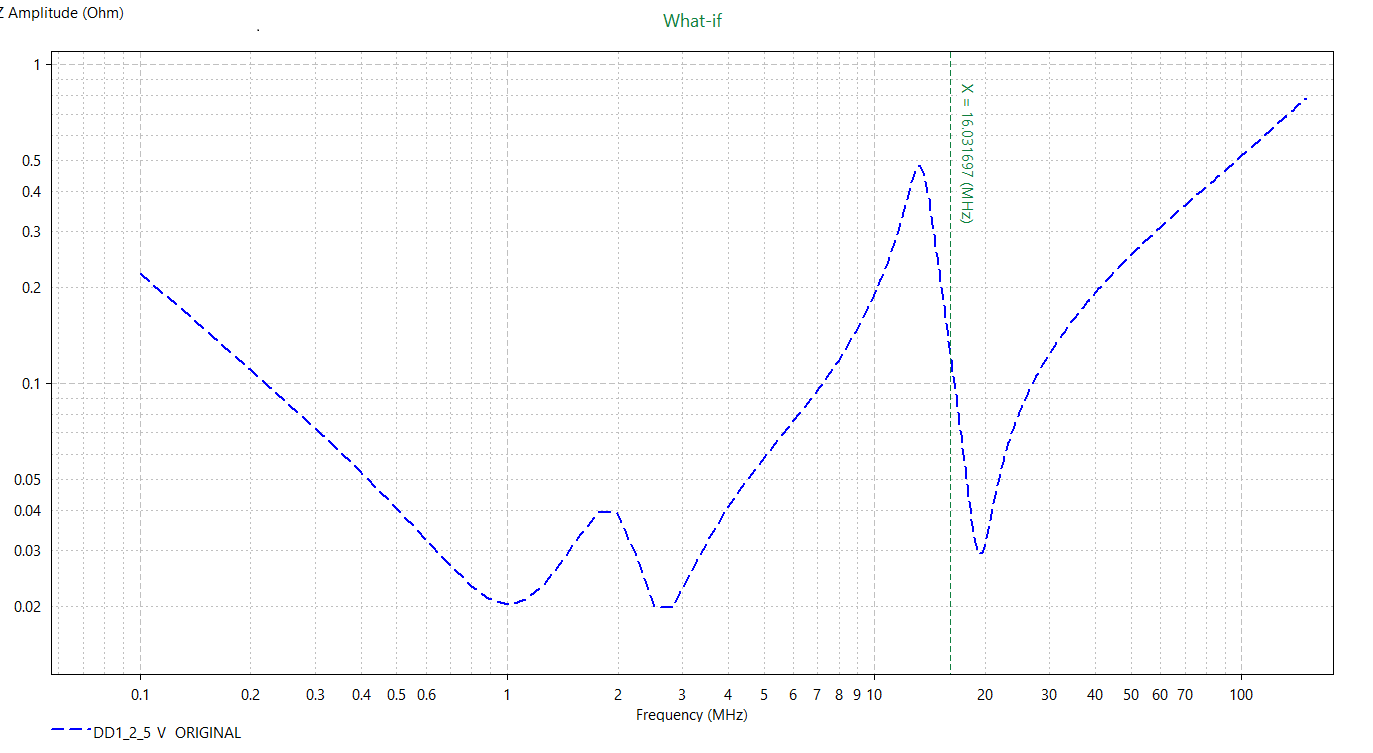 Рисунок 1. Импеданс полигона (Cadence Sigrity OptimizePI).
Рисунок 1. Импеданс полигона (Cadence Sigrity OptimizePI).
Рассмотрев импеданс цепи питания 2_5V, можно сделать вывод, что полигон питания при оригинальной матрице конденсаторов обладает неоптимальным импедансом, что приводит к отказам функционирования модуля. При этом ПЛИС потребляет по этому питанию 40 мА постоянного тока. Матрица фильтрующих конденсаторов состояла из трех позиций: С57 (0805) – 10 мкФ, С64 (1206) – 1 мкФ, С72 (0402) – 0,1 мкФ.
 Рисунок 2. Топология полигона питания 2_5V (Cadence Sigrity PowerSI).
Рисунок 2. Топология полигона питания 2_5V (Cadence Sigrity PowerSI).
Применили автоматизированный подбор матрицы емкостей для борьбы со скачком импеданса до рабочей частоты в 125 МГц. Перебор проводился с доступных номиналов из проекта.
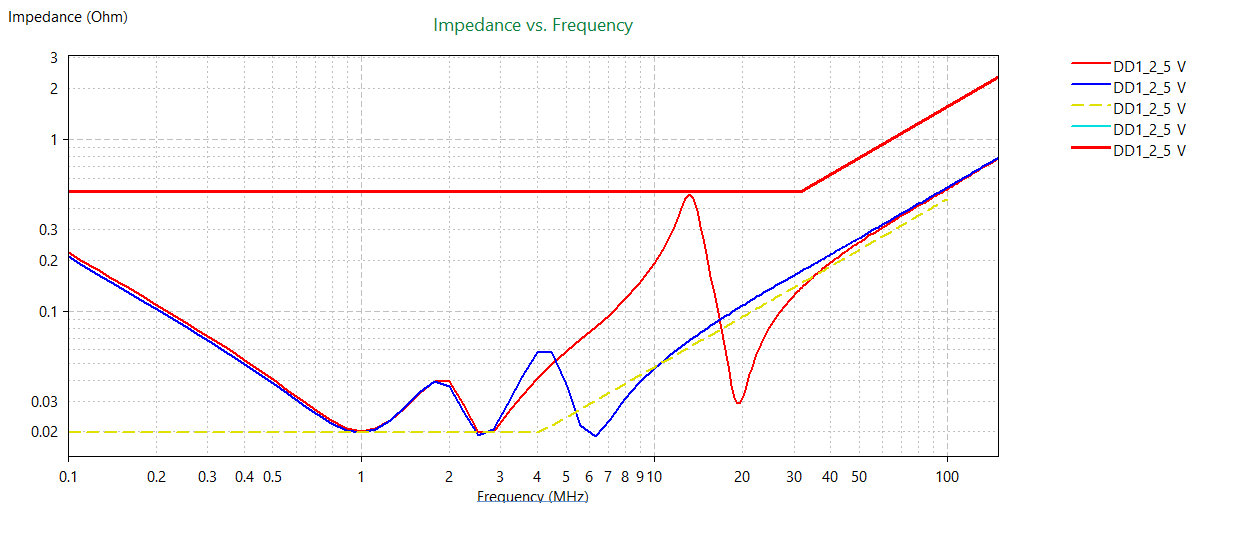 Рисунок 3. Оптимизация матрицы фильтрающих конденсаторов (Cadence Sigrity OptimizePI).
Рисунок 3. Оптимизация матрицы фильтрающих конденсаторов (Cadence Sigrity OptimizePI).
Сменив емкость конденсатора с посадочным местом С72 на 1мкФ (ранее 0,1 мкФ), получили матрицу: С57 (0805) – 10 мкФ, С64 (1206) – 1 мкФ, С72 (0402) – 1 мкФ. Из рисунка 3 видим, что при этом нивелируется скачок импеданса около 16 МГц. После перепайки конденсатора устройство запустилось и успешно прошло испытания в климатических условиях ±60 градусов.